Исследование и моделирование механизмов регуляции социального поведения и обучения для группы автономных роботов
Проект выполнен при поддержке РФФИ (проект № 7-29-07083 офи_м)
Коллектив
Когнитивный блок
- Величковский Б.М.
- Шишкин С.Л.
- Дубынин И.А.
- Чжао Д.Г.
Этологический блок
- Бургов Е.В.
Нейрофизиологический блок
- Ивашкина О.И.
- Торопова К.А.
- Груздева А.М.
Робототехнический блок
- Карпов В.Э.
- Ровбо М.А.
- Сорокоумов П.С.
Оглавление
Работы велись по четырем направлениям (блокам): этологическому, когнитивному, нейробиологическому и робототехническому. В целом можно констатировать, что результаты естественно-научных исследований позволили получить ряд конструктивных моделей и методов управления поведением социумом искусственных агентов, часть которых была апробирована как на уровне имитационного моделирования, так и на реальных робототехнических устройствах. Этологические исследования позволили сформулировать задачи и создать модели управления поведением искусственных агентов на макроуровне. Результаты нейробиологических исследований позволили получить и реализовать такие механизмы, как подражательное поведение и социальное обучение, а также создать модель ассоциативной памяти искусственного агента (робота). Когнитивные исследования позволили определить особенности человеко-машинного взаимодействия (оператор-группа роботов и оператор-робот) и создать специфический интерфейс на основе виртуальной реальности. Еще одним крайне важным результатом когнитивных исследований стали исследования механизмов агентивности, что позволило с полным основанием ввести в систему управления роботами механизм определения принадлежности действия агенту – основу для моделей социального обучения и подражательного поведения.
Этологический блок
Основная задача исследований касалась создания моделей поведения и определения биологически инспирированных пространственных параметров, необходимых для реализации социумов искусственных агентов. Для этого были проведены трехлетние (2018-2020 гг.) мониторинговые исследования комплексов муравейников Рязанской области, собраны данные по структуре комплексов муравейников, функциональным характеристикам различных видов муравьев Formica. Внутри рода выделены две экологические группы. Полученные данные по скорости движения муравьев использованы при расчете параметров модельной группы роботов. Исследованы различные аспекты функционирования смешанных семей муравьев (на модели смешанных семей F. sanguinea и F. cinerea). Были предложены параметры среды и специфические объекты для моделирования киноптических реакций (создания аналога «языка поз» у муравьев).
Были разработаны принципы формирования природоподобной группы роботов на модели семей муравьев: принцип управления группой при помощи элементов инфраструктуры; конкуренция агентов за индивидуальные поисковые участки. Описана организация фуражировки в группе искусственных агентов. Определены основные характеристики группы. На основе расчетов качественных и количественных характеристик группы выполнена трехмерная модель полигона. В среде Kvorum отработан механизм неспецифической активации фуражиров. Создана виртуальная модель полигона в среде Kvorum, протестировано функционирование группы аниматов (пассивных и активных фуражиров) при различных соотношениях численности особей. Предложенная инфраструктура реализована на полигоне лаборатории робототехники НИЦ «Курчатовский институт»; отработано использование роботами искусственных элементов инфраструктуры: «гнезда» и «дорожно-тоннельной» системы. Разработаны алгоритмы фуражировки, имитирующие общее вторичное деление территории, а также алгоритмы, имитирующие функционирование семей муравьев-рабовладельцев. Предложенные в ходе исследований параметры зрительного анализатора опробованы на виртуальной модели, включающей действующую группу, «гнездо» и «вражеских особей».
Когнитивный блок
В рамках когнитивного блока изучались возможности повышения эффективности взаимодействия оператора и роботов с использованием аналогов коммуникации между людьми. Фактически, речь шла о реализации фундаментального задела механизма оперативного управления поведением социума искусственных агентов. Большинство исследований проводилось на моделях взаимодействия оператора с группировкой мобильных роботов, представляемых объектами, движущимися по экрану. В качестве основного элемента взаимодействия использовался последовательный выбор таких объектов с помощью прослеживания их взглядом – это действие может использоваться для получения информации от конкретного робота, для инициации более сложной коммуникации с ним, для назначения одного из роботов лидером группировки и для решения многих других задач. Взгляд используется при решении подобных задач и в естественной коммуникации между людьми, поэтому можно было ожидать, что его возможности будут сопоставимы с использованием традиционных механических указателей. При этом руки оператора могут использоваться им для решения других задач взаимодействия с роботами или компьютерами.
Ожидалось, что отдельные задачи выбора робота могут выполняться с помощью взгляда даже лучше, чем с помощью механических указателей. В частности, это можно было ожидать в случае, когда роботы движутся с угловой скоростью, попадающей в диапазон, удобный для прослеживания взглядом. Это действительно было показано в исследовании с участием 16 испытуемых, которые использовали для выбора объектов, движущихся по экрану со скоростью 12 градусов в секунду, прослеживающие движения глаз, отслеживаемые айтрекером, либо компьютерную мышь (Isachenko et al., 2018): в первом случае выбор производился быстрее. Более того, большинство испытуемых воспринимало выбор с помощью взгляда как более удобный.
В другом исследовании традиционный метод выбора робота (кнопка мыши) на экране сравнивался с гибридным методом: объект указывался взглядом, а для подтверждения его выбора использовалась простая голосовая команда. В отличие от других исследований такого рода, анализ содержания команды не проводился – голос использовался не как семантически богатый коммуникативный канал, а лишь в качестве замены «клика» мышью. Это позволило упростить задачу испытуемого, а также отказаться от использования системы распознавания речи, что, в свою очередь, позволило ускорить «клик», при этом ускорение «клика» позволило улучшить его согласованность с подачей команды взглядом. Испытуемые сравнительно быстро и с легкостью освоили использование сочетания взгляда и голоса – по-видимому, опираясь на уже имеющиеся у них навыки коммуникативного взаимодействия, но не с роботами, а с другими людьми.
Это исследование было сначала проведено в пилотном варианте с участием 12 испытуемых, а после доработки технических компонентов методики – в формате полноценного исследования с участием 23 испытуемых. Участники исследования успешно осуществляли многократный выбор робота на экране компьютера, что оказалось незначительно медленнее, чем при подтверждении нажатием кнопки мыши. Оценка качества взаимодействия пользователей в случае подтверждения голосом оказалась лишь ненамного ниже, чем при обычном подтверждении щелчком мыши. Результаты исследования опубликованы в журнале, входящем в первый квартиль по Scimago (Zhao, Karikov, Melnichuk, Velichkovsky, & Shishkin, 2020).
Была создана и протестирована система управления на базе макета удаленного мобильного робота (подробности см. в Дополнительных материалах). На основе созданной робототехнической системы была разработана методика удаленного управления с использованием «взглядоуправления» видеокамерой, установленной на одном из роботов из мобильной группировки.
На основе созданной робототехнической системы была разработана и отлажена в экспериментах с участием испытуемых, выполняющих роль операторов, методика исследования возможных эффектов влияния чувства авторства действия (агентивности, агентности) на пространственные оценки дистанций выбега моторизованной платформы робота. Оценки дистанций производились посредством наблюдения видеоизображения с бортовой камеры робота, а также (неявно) путём получения слуховой информации о движении.
Цикл когнитивных исследований в рамках проекта продемонстрировал значительный потенциал новых средств человеко-машинной коммуникации, основанных на естественных формах коммуникации между людьми, для осуществления взаимодействия с группировками мобильных роботов.
Нейробиологический блок
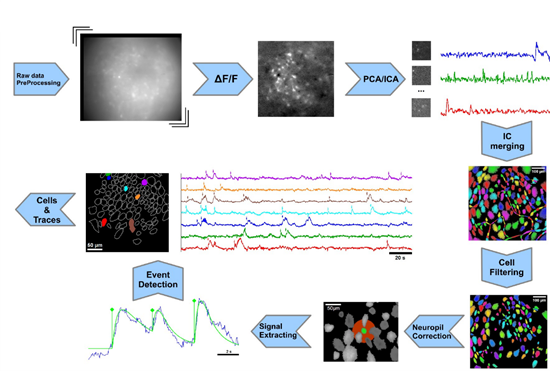
Основная задача нейрокогнитивного блока заключалась в создании основы для моделей, описывающих базовые когнитивные и социальные функции агентов – членов социума. Была проведена регистрация активности нейронов гиппокампа мышей при формировании и извлечении индивидуальной и социальной памяти в задаче социальной передачи вкусового предпочтения у одного и того же животного методом минископии. Был успешно извлечен кальциевый сигнал у 5 мышей, выделено суммарно более 900 нейронов и установлены их специализации относительно поведенческих актов животного. Было показано, что активность нейронов гиппокампа проявляет специфичность относительно положения мыши в пространстве, а также относительно значимых для формирования памяти объектов. Кроме того, нами впервые было показано, что необходимые для формирования социальной памяти акты взаимодействия с животным-демонстратором также отражаются в нейрональной активности животного-наблюдателя. Нами впервые в мире было проведено сравнение нейрональных субстратов социального и индивидуального обучения у одного и того же животного. Были установлены специализации нейронов гиппокампа относительно запаха и вкуса знакомого целевого и незнакомого контрольного корма. Было показано, что при предъявлении кормушек с пищей одинакового вкуса и запаха разница в распределении количества специализированных клеток не наблюдается как при обучении наблюдательном, так и при обучении индивидуальном, в то время как предъявление одновременно знакомого и нового корма ведет к увеличению количества нейронов, специализированных относительно нового вкуса и запаха пищи. Таким образом, независимо от того, каким типом была сформирована память, через индивидуальный опыт или через опыт социальный, нейроны гиппокампа проявляют одинаковую специфическую активность на вкус и запах пищи в соответствии с его новизной. Однако, как было показано в прошлом отчетном году, непосредственно предпочтение в выборе знакомого или незнакомого корма различается от типа опыта, что говорит о включении и других структур мозга при формировании предпочтений.
Робототехнический блок
Задача этого блока – реализация полученных в базовых биологических и когнитивном блоках моделей, методов и алгоритмов на уровне создания робототехнических систем. Был рассмотрен ряд моделей и архитектур, которые позволяют создавать высокоуровневый каркас для базовых механизмов социального поведения. Разработана система управления агентом на основе семиотической сети, пригодная для описания социальных взаимодействий и гибкого управления ими, а также управления их восприятием. Разработана архитектура параметрического управления индивидуальным агентом на основе семиотической сети, пригодная для социального управления. Для данной архитектуры был предложен метод адаптации и внешнего управления. Использование семиотической сети позволило разработать метод, позволяющий в ряде случаев строить управляющий алгоритм с параллельно работающими автоматами без необходимости непосредственного учета возникающих коллизий (конфликтующих конечных автоматов).
Было показано, что эмоционально-потребностная архитектура интеллектуального агента, вкупе с семиотической системой управления, позволяет реализовывать внутрисоциальное взаимодействие, основанное на использовании моральных норм. Показано, что такой искусственный агент (робот) вполне может удовлетворять требованиям, предъявляемым к моральным агентам. При этом мораль рассматривается как способ разрешения конфликтов между агентами и служит для повышения адаптивных способностей как индивидумов, так и группы в целом.
Развитие сенсорных способностей агентов (роботов) также осуществлялось на основе знаковой (семиотической) модели. Разработанная модель позволяет объединять сенсорные данные различной природы в рамках программной части комплексного сенсора, формирующего картину мира примитивного агента на основе текущих восприятий множества простых сенсорных устройств.
Были рассмотрены вопросы группового управления обучающихся агентов на примере задачи фуражировки. Формулировка метода обменов была адаптирована для BDI модели, а также рассмотрены модификации, позволяющие агентам взаимодействовать за счет виртуального ресурса. Сравнение было проведено, в том числе, с методами на основе BDI архитектуры и досок объявлений, а также с формулировкой задачи в терминах планировщика STRIPS.
Были проведены исследования по регуляции сложного поведения группы агентов (роботов) на основе использования таких базовых механизмов, как память (узнавание), агрессия и доминирование. В том числе были предложены модели инициации агрессивного поведения. Были разработаны модели подражательного поведения и социального обучения как базисные методы социального взаимодействия между искусственными агентами на основе результатов нейробиологического блока исследований. Кроме того, была создана модель ассоциативной памяти анимата, решающая задачу ориентации в пространстве.
Была разработана архитектура управления для робототехнических систем с обучением, позволяющая комбинировать различные алгоритмы целенаправленного поведения, а также предложен алгоритм управления верхнего уровня, переключающий управление между базовыми алгоритмами. Был проведен его анализ для задачи, сформулированной в терминах обучения с подкреплением.
В плане развития интерфейсов была разработана подсистема взаимодействия человека с группой роботов с помощью средств виртуальной реальности, позволяющая оператору воспринимать окружение с точки зрения выбранных роботов из группы, получать данные о состоянии робота и ходе выполнения им задачи, а также корректировать рабочий процесс. Тестирование показало, что показатели качества управления для разработанного интерфейса несколько выше, чем у традиционного графического. Для практической отработки предложенных механизмов была создана модель группы мобильных агентов, позволяющая выполнять задачу поиска нужной точки в лабиринте путём сочетания нескольких подходов к планированию действий агентов, в том числе методов машинного обучения и логического вывода на основе знаковых моделей. Исследовано поведение группы агентов при различных вариантах постановки задачи и комбинирования поведений.
В рамках задачи создания инфраструктуры в соответствии с результатами этологического блока была разработана серия виртуальных полигонов для решения задачи фуражировки в расширенной постановке с динамическими элементами (восполнение целей, энергетические затраты и восполнение), на его основе проведена апробация предложенных методов.
Важнейшие научные результаты
1. Этологический блок
1.1. Мониторинг комплексов муравейников. Проведены трехлетние (2018-2020 гг.) мониторинговые исследования комплексов муравейников Рязанской области (в том числе, продолжены многолетние исследования). Внутри описанного комплекса гнезд F. cinerea обнаружено поселение муравья-рабовладельца F. sanguinea. Обнаружена новая для вида пространственно-функциональная структура. Выявлено поселение F. cinerea (песчаного муравья), имеющее высокую мощность и структуру, не описанную ранее в литературе.
1.2. Исследование функционльных характеристик муравьев Formica. Получены новые данные по функциональным различиям видов рода Formica, скоростям движения рабочих по различным поверхностям, расширен перечень модельных видов. Внутри рода можно выделить две экологические группы: муравьи, способные к самостоятельному движению и переносу грузов по тонкой траве, и муравьи, вынужденные двигаться по свободному от травы пространству. К первой относятся представители подродов Formica s.str. (F. polyctena и F. pratensis) и Raptiformica (F. sanguinea), ко второй – Serviformica (F. cunicularia, F. cinerea) и Coptoformica (F. exsecta, F. pressilabris) (Бургов, 2018a), (Бургов, 2020a).
Собраны расширенные данные по скоростям движения, предпочтениям различных видов по выбору субстратов для перемещения. На основании собранных данных можно получить температурный коэффициент для расчета скорости движения муравьев Formica в различных условиях. Данные по скорости движения муравьев использованы при расчете параметров модельной группы роботов, например, размеров полигона (Бургов & Малышев, 2019), (Малышев & Бургов, 2020).
1.3. Исследование функциональной дифференциации в гетерогенных социальных системах. В смешанных семьях, образованных путем временного социального паразитизма, сочетаются функции представителей обеих групп (показано на модели смешанной семьи F. sanguinea и F. cinerea). Такое сочетание обеспечивает смешанной семье возможность более полного и эффективного использования ресурсов среды. Принцип функционального разделения внутри смешанной семьи используется и при организации гетерогенной группы роботов.
Описаны поселения муравьев-рабовладельцев F. sanguinea в условиях песчаных почв. Специфика данных поселений заключается в формировании сообществ с песчаными муравьями F. cinerea, существовании на одной территории различных семей данных видов: гомо- и гетерогенных систем. На основании результатов исследований данных семей предложена гипотеза о разделении функций в гетерогенных группах муравьев.
1.4. Определение параметров зрительного анализатора анимата, моделирование киноптических реакций.
В качестве решения, способного придать анализатору аниматов (роботов) возможностей, аналогичных некоторым возможностям зрительных сенсорных систем муравьев, было предложено расширение поля зрения. Для моделирования киноптических реакций (создания аналога «языка поз» у муравьев) были предложены параметры среды и специфические объекты (Московский et al., 2021).
1.5. Разработка общих принципов функционирования природоподобных групп роботов. Разработаны принципы формирования природоподобной группы роботов на модели семей муравьев: принцип управления группой при помощи элементов инфраструктуры; конкуренция агентов за индивидуальные поисковые участки (Бургов, 2020b). Первый принцип предполагает создание и изменение элементов инфраструктуры (главный из которых – аналог основного гнезда). Перемещая гнездо, можно менять область деятельности группы по аналогии с тем, как это, например, делается в пчеловодстве. Конкуренция за индивидуальные поисковые участки – естественный принцип распределения агентов по территории, в ходе которого происходит рациональное разделение пространства и источников ресурсов между ними.
1.6. Разработка и апробация алгоритмов, необходимых для реализации принципов организации биоподобной группы. Описана организация фуражировки в группе искусственных агентов. Определены основные характеристики группы. На основе расчетов качественных и количественных характеристик группы выполнена трехмерная модель полигона. В среде Kvorum отработан механизм неспецифической активации фуражиров (Бургов & Малышев, 2019), (Малышев & Бургов, 2020). Выполнена виртуальная модель полигона в среде Kvorum, протестировано функционирование группы аниматов (пассивных и активных фуражиров) при различных соотношениях численности особей. Предложенная инфраструктура реализована на полигоне лаборатории робототехники НИЦ «Курчатовский институт»: отработано использование роботами искусственных элементов инфраструктуры: «гнезда» и «дорожно-тоннельной» системы. Разработаны алгоритмы фуражировки, имитирующие общее вторичное деление территории. Предложены алгоритмы, имитирующие функционирование семей муравьев-рабовладельцев. Предложенные параметры зрительного анализатора опробованы на виртуальной модели, включающей действующую группу, «гнездо» и «вражеских особей» (Московский et al., 2021).
2. КОГНИТИВНЫЙ БЛОК
2.1. Уточнение и расширение спектра моделей коммуникативного взаимодействия, адаптация методики и реализуемых их алгоритмов и ПО. На начальном этапе были уточнены ранее предложенные методы и подходы к взаимодействию оператора и роботов с использованием взгляда, в особенности на расширении его понимания как коммуникативного акта на взаимодействие с группировкой мобильных роботов.
В результате, была сформирована методика и проведено предварительное исследовании, где оператор взаимодействовал с моделью группировки мобильных роботов, демонстрируемых на компьютерном экране, с помощью движений глаз, выбирая нужных роботов в субгруппировку путем прослеживания их движений. Было установлено, что циклический способ выбора не создавал явных преимуществ перед выбором каждого робота по отдельности – возможно, вследствие невозможности быстро (в пределах эксперимента) автоматизировать навык перевода взгляда на очередного робота. Также оказалось, что, поскольку в текущей версии системы корректность распознавания команды можно контролировать только визуально, использование взгляда для подачи команд имеет существенные временные ограничения: его быстрый перевод на новый объект приводит к потере возможности отследить, удалось ли выбрать предыдущий объект.
Полученные результаты использовались для уточнения методики выбора движущегося объекта с помощью прослеживающих движений глаз. Подробности описаны в публикации (Isachenko et al., 2018). Улучшения были реализованы в компонентах ПО в составе экспериментального стенда, имитирующего на компьютерном экране группировку мобильных роботов и позволяющего взаимодействовать с ними с помощью взгляда, отслеживаемого айтрекером, голоса и с использованием стандартной компьютерной мыши. Был выполнен ряд экспериментальных исследований.
В первом из них, проведенном с участием 16 испытуемых, было подтверждено предположение, что в случае, когда выбираемый с помощью взгляда объект находится в движении, его выбор с помощью взгляда может быть более эффективен, чем при использовании компьютерной мыши (подробнее см. (Isachenko et al., 2018)). По-видимому, этого удалось достичь как с помощью оптимизации алгоритма выбора, так и в связи с тем, что мы впервые для такой задачи рассматривали особый вариант этой задачи – выбор подвижного объекта.
Во втором исследовании, проведенном с участием 12 испытуемых, использовалась методика выбора движущегося робота с помощью сочетания прослеживания его взглядом и подачи короткого голосового сигнала-подтверждения. В этом случае значимых результатов достичь не удалось – выбор сочетанием взгляда и голоса делался в среднем приблизительно с той же скоростью, как и с помощью клика мыши, а оценки комфортности взаимодействия оказались даже ниже. Это исследование носило предварительный характер. В нем использовалась простейшая версия детектора голосовой команды, из-за чего испытуемым приходилось тратить дополнительное внимание на генерацию распознаваемой голосовой команды, а выбор голосовых команд был оптимизирован лишь частично. Последнее обстоятельство, судя по результатам опросов испытуемых, могло повлиять весьма существенно. Так, использование в качестве голосовой команды «имени» робота – названия буквы алфавита, которой он был помечен – вызывало у многих испытуемых затруднения в связи с их неуверенностью в точности используемых названий букв, а использование слово «ты» мешало выполнять задание выбирать роботов в алфавитном порядке, поскольку это задание требовало перебирать имена роботов, обозначающих буквы, и возникала своего рода интерференция с произносимым словом «ты». В то же время представляет интерес быстрота освоения и легкость использования испытуемыми сочетания взгляда и голоса – при том, что такого рода способ подачи команд никогда не использовался ими ранее во взаимодействии с техникой. Это может свидетельствовать о том, что испытуемые опирались на уже имеющиеся у них навыки коммуникативного взаимодействия – но не с роботами, а с другими людьми, ведь сочетание направления взгляда на другого человека и речевого обращения к нему является обычной формой инициации коммуникативного взаимодействия.
2.2. Предварительное экспериментальное исследование возможностей управления группировкой мобильных роботов на основе моделей коммуникативного взаимодействия. Результаты описанного выше предварительного эксперимента были учтены в последующем исследовании, проведенном с участием 23 испытуемых. Основным изменением было замена «имен» роботов – теперь вместо букв алфавита использовались обычные цифры. Также были изменены: параметры размеров и скоростей объектов на экране, характеристики определения голосовых команд и некоторые другие параметры. Все описанные изменения были основаны на замечаниях пользователей, полученных во время опроса после предыдущего эксперимента. На поиск робота и подачу команды уходило в среднем 1712 +-348 мс, когда испытуемые использовали для подтверждения слово «ты», 1626 +- 331 мс, когда они в качестве подтверждения называли номер робота, и 1581 +- 305 мс – когда использовали выбранное ими самими слово (этот режим, в отличие от других, всегда предлагался испытуемым на фиксированном месте – в самом конце эксперимента, поэтому тенденция увеличения скорости выбора могла быть связана с постепенным освоением технологии взаимодействия с помощью взгляда и голоса). Выбор робота с помощью сочетания взгляда и более стандартного подтверждающего действия – нажатия на клавишу – осуществлялся еще быстрее: на него уходило всего 1269 +- 265 мс, причем лишь этот режим демонстрировал статистические значимые отличия от остальных (p=0,00015 для сравнений этого режима со всеми остальными, post-hoc критерий Тьюки). Следует иметь в виду, что подтверждение подаваемой взглядом команды с помощью моторного действия не всегда возможно: оно может быть недоступно тяжелым инвалидам, а также в случае, когда обе руки у оператора заняты выполнением других операций.
Большой интерес представляют ответы испытуемых на вопросы опросника, предлагавшегося им после эксперимента. Большинство испытуемых (16 из 23) сочли подтверждение отдаваемой взглядом команды моторным действием наиболее удобным, однако высоко оценили и подтверждение с помощью вокализации. Подтверждение называнием номера выбрали как наиболее удобный среди режимов с подтверждением вокализацией 17 из 23 участников эксперимента, и количественные оценки удобства этого метода были значимо выше, чем подтверждения с помощью слова «ты» (p=0,0004 по критерию Вилкоксона). Количественные оценки качества взаимодействия всех пользователей в случае подтверждения голосом оказалась не намного ниже, чем с обычным подтверждением щелчком мыши: удобство выбора было оценено 8,0(+-)2,1 (M(+-)SD, по 10-балльной шкале) в наиболее удобном варианте голосового подтверждения (по номеру робота), в то время как оценка подтверждения щелчком мыши была 9,2(+-)1,1. По-видимому, весьма нежелательно использовать для подтверждения одно и то же слово, если команды надо давать часто (половина испытуемых отметила, что это им мешало при использовании слова «ты»). Как уже отмечалось ранее в предварительной серии, использование слова «ты» отвлекало от выполнения задачи выбора роботов в соответствии с их нумерацией, тогда как произнесение номера робота, напротив, способствовало ее выполнению. Нельзя исключить, что такая «интерференция» может исчезнуть с автоматизацией подачи команды при достаточно продолжительной практике. Интересно, что при свободном выборе некоторые испытуемые выбрали слово «да» и сочли его использование удобным, тогда как именно это слово в предварительных экспериментах вызвало резко отрицательную реакцию у части испытуемых. Испытуемые, исходя из своего опыта свободного выбора слова для подтверждения, отмечали важность его удачного подбора.
Результаты опроса в целом указывают на желательность использования для подтверждения слова, естественным образом ассоциирующегося с роботом, например, его номера (как в эксперименте) или имени (что, по-видимому, может дать не худшие или даже существенно лучшие результаты, но в эксперименте не использовалось, поскольку потребовало бы много дополнительного времени на запоминание имен роботов, существенного уменьшения «группировки» и других нежелательных модификаций эксперимента). По-видимому, для подтверждения отдаваемой взглядом команды с помощью короткой вокализации оптимальным является использование либо слова, естественным образом ассоциирующегося с командой или номером/именем робота, либо (при нечастой подаче команд) слова, выбранного самим оператором. Важно, чтобы выбранные слова были достаточно короткие, поскольку длинные слова могут вызвать повторные срабатывания, либо существенно замедлить распознавание команды (что неудобно при использовании взгляда), либо потребовать удлинения периодов нечувствительности, из-за которых, в свою очередь, станет невозможным частая подача команд тогда, когда это будет требоваться.
Также следует отметить, что, хотя произнесение слова «ты» оказалось сравнительно неудобным способом подтверждения команды, отдаваемой взглядом, это могло быть связано с особенностями эксперимента – одно и то же слово требовалось произносить слишком часто и слишком много раз. Не исключено, что если бы его требовалось произносить существенно реже (например, только при обращении к роботам, имена которых неизвестны, либо когда их трудно вспомнить), с ним также было бы удобно работать. По полученным результатам была опубликована статья в журнале Applied Sciences, находящемся в квартиле Q1 по версии SCIMago Journal Rank (Zhao et al., 2020).
2.3. Реализация разработанных методик в алгоритмах и ПО, анализирующих данные айтрекинга в режиме реального времени. Реализации алгоритмов, анализирующих данные в режиме реального времени, использовались в экспериментальных сериях, описанных выше. Также, в рамках задачи, была разработана система, предназначенная для взаимодействия оператора с удаленным мобильным роботом «RoboVagrant» (подробнее см. Дополнительные материалы). Для внедрения «взглядоуправления» один из роботов был оснащен видеокамерой, передающей онлайн изображение на клиентскую программу, способной перемещаться в горизонтальной и вертикальной плоскостях посредством сервоприводов. Управление сервоприводами было привязано к перемещению глаз (онлайн управление) – для этого оператору нужно переместить точку взгляда к одной из областей с виртуальными кнопками (которые находились на краях экрана), после чего камера смещалась в соответствующем направлении. Для движения робот оснащен передним колесным приводом, на корме робота расположено пассивное колесо, способное вращаться в горизонтальной плоскости (вокруг оси Y), при этом активация моторов осуществлялась с помощью клавиатуры. Управление роботом, получение с него видеосигнала осуществлялись в созданном нами клиентском приложении, работающим в среде Windows 7, возможностью различных модификаций последующих экспериментов (подробнее см. Дополнительные материалы).
2.4. Дополнительное экспериментальное ииследование эффективности и эргономичности управления группой роботов. В ходе исследования эффективности и эргономичности управления группой роботов (дополнительное исследование) была подготовлена и проведена пилотная серия экспериментов с участием 4х испытуемых. В этом экспериментальном исследовании нами была создана новая, не имеющая аналогов, методика, в которой проверялось наличие эффекта пространственного связывания в ситуации взаимодействия с мобильным роботом при наблюдении испытуемым бортового видеоизображения, транслируемого по радиоканалу. Управление роботом, получение с него видеосигнала, реализация сценария эксперимента также осуществлялись в созданном нами клиентском приложении, работающим в среде Windows 7 (подробнее см. Дополнительные материалы).
Основываясь на литературных данных, а также на результатах своих предыдущих исследований, мы предположили наличие эффекта, аналогичного временному интенциональному связыванию. В этом случае, ожидалось сокращение пространственных субъективных оценок при инициации движения испытуемым по сравнению с оценками, полученными при пассивном наблюдении за движением робота, когда пусковую команду отдает помощник экспериментатора или управляющая программа без участия человека.
Следует отметить, что полученных в предварительном эксперименте данных недостаточно для опровержения или подтверждения гипотезы наличия эффекта смещения субъективных пространственных оценок расстояний для активных действий (подробнее, см. Дополнительные материалы). Рассматривая индивидуальные данные, можно отметить отсутствие устойчивых тенденций и разнонаправленность оценок у испытуемых по ходу эксперимента. Тем не менее, у испытуемого №1 разница между условиями достигала 9.75 см, а у испытуемого №4 11.42 см. Испытуемому №1 предъявлялось пассивное условие с помощником экспериментатора, а испытуемому №4 пассивное условие, где движение инициировалось роботом. Может ли на эффект оказывать влияние человека в качестве внешнего агента действия остается неясным. Для прояснения данного вопроса необходимо набирать дополнительные данные. У двоих испытуемых наблюдался некий краевой эффект в первых 10-15 пробах. Вероятнее всего это связано с врабатыванием и привыканием к экспериментальной процедуре. Также неясной остаётся роль звука моторов, который слышали испытуемые, поскольку находились с роботом в одном помещении. В будущих экспериментах необходимо контролировать этот фактор.
В результате проведенного пилотного эксперимента у двоих из четырех испытуемых был обнаружен ожидаемый эффект субъективного сокращения пространственных оценок в активном условии относительно пассивного условия. Для подтверждения или опровержения данного эффекта требуется проведение дальнейших исследований. В том случае, если эффект все же подтвердится, это может открыть дорогу к разработке уникальной и при этом объективной методики оценки качества человеко-машинного взаимодействия.
3. НЕЙРОБИОЛОГИЧЕСКИЙ БЛОК
3.1. Регистрация активностей нейронов гиппокампа мышей. Была проведена регистрация активности нейронов гиппокампа мышей при формировании и извлечении индивидуальной памяти о новом вкусе пищи и при социальной передаче вкусового предпочтения у одного и того же животного методом прижизненного кальциевого имиджинга с помощью минископа NVista HD (см. Методы и подходы).
Всего было 7 сессий съемки кальциевой активности нейронов гиппокампа для каждой мыши продолжительностью 60 минут. Индивидуальное обучение новому вкусу пищи включало сессию привыкания к кормлению из кормушек, сессию индивидуального обучения новому вкусу пищи и сессию тестирования индивидуальной памяти. Социальная передача вкусового предпочтения включала сессию привыкания к кормлению из кормушек, сессию повторного кормления из кормушек в день взаимодействия с животным–демонстратором, сессию взаимодействия, в течение которой происходила социальная передача вкусового предпочтения, и сессию тестирования социальной памяти.
В эксперименте участвовало 7 мышей, однако, из-за недостаточного уровня экспрессии кальциевого сенсора, два животных были исключены из анализа. В остальных пяти животных был успешно зарегистрирован кальциевый сигнал, выделено суммарно 988 клеток (с не менее n=3 спайками), из которых 700 удовлетворяли критериям пространственной информативности (см. Методы и Рис.3.1.1). Из информативных клеток было выделено 153+-82 в зависимости от сессии полей места и полей места объектов.
3.2. Анализ активностей нейронов гипокампа при формировании и извлечении различных типов памяти. Был проведен анализ активности нейронов гиппокампа животных в связи с различными формами поведения при формировании и извлечении индивидуальной и социально переданной памяти о новом вкусе пищи. Была установлена специализация зарегистрированных клеток относительно положения животного в клетке, относительно положения кормушек со знакомым и новым вкусом и запахом пищи, а также относительно актов взаимодействия с животным-демонстратором в сессии социальной передачи вкусового предпочтения (см. Методы и Рис.3.2.1).
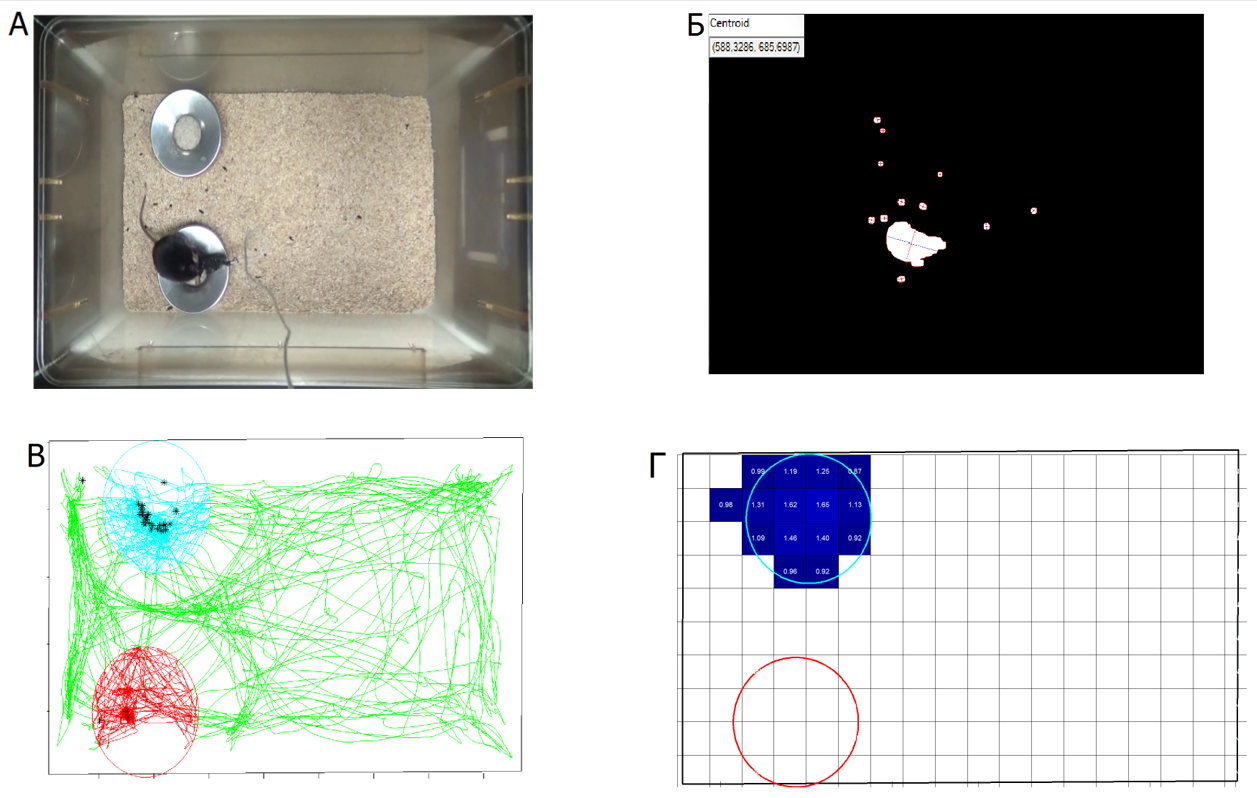
Рис.3.2.1. Этапы совмещения данных кальциевой активности и данных поведения животного. Мышь в течение сессии индивидуального обучения (А), определение координат животного в среде Bonsai (Б), траектория животного в течение всей сессии с нанесенными кальциевыми событиями (В), карта активности нейрона, специфичного относительно кормушки (Г)
В каждой сессии нейроны гиппокампа проявляли специфическую активность относительно положения мыши в домашней клетке. Анализ показал, что животные обладают сформированной когнитивной картой пространства домашней клетки, с полями места, распределенными равномерно по области, не включающей зоны кормушек (Рис.3.2.2(А)). Также нейроны гиппокампа проявляли специфическую активность относительно положения объектов – кормушек с пищей. Несмотря на то, что зоны кормушек покрывают меньшую долю исследуемого пространства, нейронов с полями места кормушек в сессиях с предъявлением, как знакомого, так и нового корма, было значимо больше, чем нейронов с полями места (Рис.3.2.2(Б)). Таким образом, нами было показано, что положение кормушек с пищей является значимой зоной и при формировании, и при извлечении индивидуальной памяти, а также при извлечении памяти социальной, и информация об их значимости кодируется нейронами гиппокампа, что согласуется с имеющимися научными данными (Lee et al., 2020).

Также нами впервые в мире были установлены специализации нейронов во время формирования социальной памяти относительно взаимодействия с животным-демонстратором (см. Методы). Нейронов специфически активирующихся во время актов взаимодействия с животным-наблюдателем было больше, чем нейронов, чья активность в большей степени проявлялась на средней дистанции мыши-наблюдателя от мыши-демонстратора (318 против 213), что говорит о значимой роли актов взаимодействия при формировании социальной памяти о новом вкусе и запахе пищи.
3.3. Сравнение нейрональных субстратов социального и индивидуального обучения у одного и того же животного. Проведено сравнение нейрональных субстратов социального и индивидуального обучения у одного и того же животного. Для этого были установлены специализации нейронов гиппокампа относительно вкуса и запаха пищи во время формирования и извлечения социально и индивидуально приобретенной памяти. Было установлено, что как во время сессии формирования индивидуальной памяти (2 одинаковые кормушки с новым вкусом и запахом), так и во время сессий привыкания (2 одинаковые кормушки с обычным знакомым кормом) формируются специализации нейронов относительно вкуса и запаха пищи. При этом распределение специфичных нейронов относительно кормушек не указывает на предпочтение одной кормушки другой (Рис.3.3.1(А)), что согласуется с отсутствием предпочтения и с количеством съеденного корма.
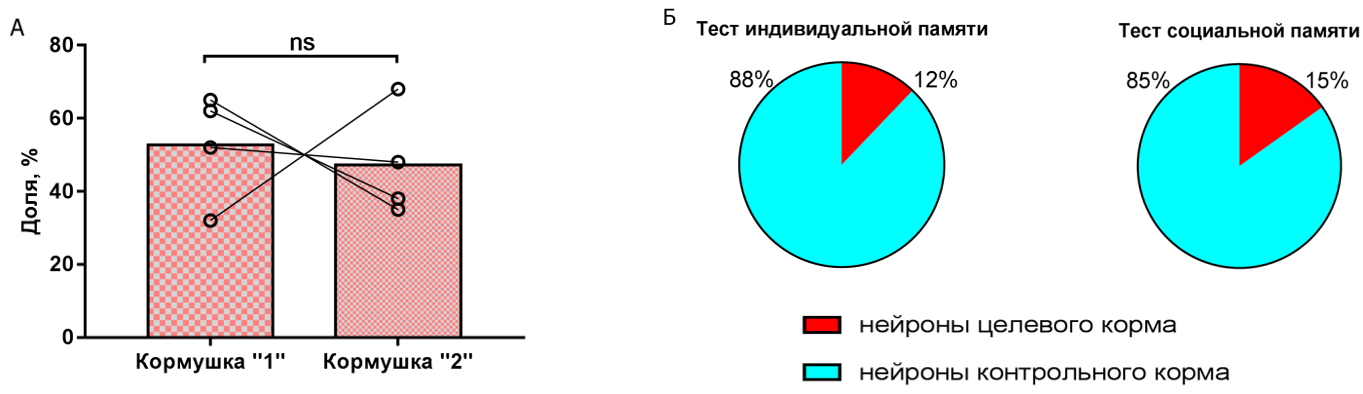
Cпециализации нейронов относительно вкуса и запаха пищи как нового контрольного, так и знакомого целевого, проявляются и в сессиях извлечения социально и индивидуально приобретенной памяти. Однако, нейронов, специфичных относительно контрольного корма с новым запахом и вкусом, было значимо больше по сравнению с нейронами, специфичными относительно знакомого корма (Рис.3.3.1(Б)), что указывает на сформировавшуюся память о вкусе и запахе целевого корма, т.к. известно, что нейроны гиппокампа в большей степени проявляют специфическую активность на «новизну». Таким образом, независимо от того, каким типом была сформирована память, через индивидуальный опыт или через опыт социальный, нейроны гиппокампа проявляют одинаковую специфическую активность как на знакомый вкус и запах корма, так и на новый незнакомый. Однако непосредственно предпочтение в выборе знакомого или незнакомого корма различается от типа опыта, как было показано в прошлом отчетном году, что говорит о включении других структур мозга в принятие решений о выборе корма.
В ходе выполнения проекта в 2018-2019 гг. нами были изучены две модели социального обучения у лабораторных грызунов: задача социальной передачи страха и задача социальной передачи вкусового предпочтения. Мы показали, что мыши успешно обучаются социальной передаче страха, наблюдая за поведением партнера-демонстратора, который получает электрокожное раздражение лап каждые 10 сек в течение 5 мин. Социальная память, формирующаяся в результате такого обучения, является долговременной и сохраняется в течение более 24 часов. Социальное обучение, как и индивидуальное, приводит к формированию ассоциативной памяти, специфической относительно используемого условного стимула и не генерализующейся на другие похожие условные стимулы. При этом способность к социальному обучению у мышей-наблюдателей не зависит от соотношения социальных статусов в паре наблюдатель-демонстратор, а наличие прошлого опыта индивидуального обучения в сходной задаче способно значительно усилить новое наблюдательное обучение у мышей. Тем не менее, память, сформировавшаяся в результате наблюдательного обучения, является более слабой, чем при индивидуальном обучении, и не все животные способны к наблюдательному обучению в использованной нами модели. Это затрудняло изучение нейрональных основ социальной памяти, поэтому в дальнейших экспериментах была использована другая широко применяемую задача наблюдательного обучения – социальную передачу вкусового предпочтения
В модели социальной передачи вкусового предпочтения было показано, что животные успешно обучаются вкусовому предпочтению от животного-демонстратора, и данное обучение приводит к формированию кратковременной, а также долговременной памяти, сохранявшейся не менее 24 часов. Кроме того, впервые в мире нами было проанализировано поведение мышей-демонстраторов по отношению к ранее знакомому им и новому корму через 24 часа после ознакомления с целевым кормом. Было показано, что животные-демонстраторы запоминали ранее съеденный ими корм, однако, в отличие от наблюдателей, у демонстраторов эта память проявлялась в устойчивом предпочтении нового, а не целевого корма. Было проведено картирование активности мозга мышей-наблюдателей и демонстраторов при помощи выявления белка-продукта немедленного раннего гена с-fos при извлечении ранее сформированной памяти о новом вкусе. Было показано, что при извлечении памяти о наблюдательном обучении в задаче социальной передачи вкусового предпочтения происходит специфическая активация орбитальной и пириформной областей коры, а также гиппокампа. При этом извлечение индивидуально сформированной памяти о новом вкусе пищи приводило к активации передних обонятельных областей, орбитальной и пириформной областей коры. Также был проведен анализ функциональной связанности областей мозга мышей при наблюдательном и индивидуальном обучении. Было установлено, что наблюдательное обучение отличает высокая функциональная связанность различных областей мозга в целом и гиппокампа в частности, тогда как индивидуальное обучение вкусовому предпочтению приводит только к формированию локальных сетей областей мозга, связанных с анализом вкусовых данных.
В отчетном году нами впервые было показано, что необходимые для формирования социальной памяти акты взаимодействия демонстратором при социальной передаче вкусового предпочтения отражаются в нейрональной активности гиппокампа животного-наблюдателя. Нами впервые в мире было проведено сравнение нейрональных субстратов социального и индивидуального обучения у одного и того же животного. Были установлены специализации нейронов гиппокампа относительно запаха и вкуса знакомого целевого и незнакомого контрольного корма. Было показано, что при предъявлении кормушек с пищей одинакового вкуса и запаха разница в распределении количества специализированных клеток не наблюдается как при обучении наблюдательном, так и при обучении индивидуальном, в то время как предъявление одновременно знакомого и нового корма ведет к увеличению количества нейронов, специализированных относительно нового вкуса и запаха пищи. Таким образом, независимо от того, каким типом была сформирована память, через индивидуальный опыт или через опыт социальный, нейроны гиппокампа проявляют одинаковую специфическую активность на вкус и запах пищи в соответствии с его новизной.
Таким образом, нами была полностью выполнена задача 3 настоящего проекта: исследование специфических свойств социального обучения и формирующейся на его основе памяти, установление отличий такой памяти от сформированной индивидуально памяти и установление нейрональных механизмов социального обучения у экспериментальных животных. Нами было показано, что у естественных социальных агентов – грызунов социальное обучение является специфическим, но тем не менее значительно более слабым, чем индивидуальное обучение. Тем не менее, наличие прошлого опыта индивидуального обучения в сходной задаче способно значительно усилить наблюдательное обучение. Этот результат открывает новые возможности для управления поведением социума, представляющего собой группу искусственных агентов, поскольку, при условии биологоподобия таких агентов, дает возможность для самопроизвольного или направляемого разделения исходно гомогенной группы агентов на подгруппы «специалистов» в определенных типах деятельности. Такие агенты в любой момент времени имеют больший опыт в знакомой им деятельности, а также больший потенциал для обучения друг друга новым формам этой деятельности, что приводит к еще большей специализации. Кроме того, полученные нами данные о нейрональных основах наблюдательного обучения показывают, что грызуны, как и исследованные ранее другими авторами приматы, при социальном обучении полагаются на «зеркальные» системы мозга, позволяющие наблюдателю распознавать, осмысливать и оценивать действия животного-демонстратора. На сегодняшний день наличие «зеркальных» систем представляется нам обязательным условием для осуществления социального, наблюдательного или подражательного обучения у любого агента – как биологического происхождения, так и искусственного. Это, в свою очередь, требует наличия в «мозге» агента таких структур, которые активируются одинаково при выполнении действия самим агентом или при наблюдении за тем же действием, исполняемым агентом-демонстратором. Кроме того, полученные нами данные о существенно более обширном вовлечении областей мозга в социальное обучение, чем в индивидуальное, у экспериментальных животных, а также о значительно большей степени скоординированности активности этих областей, по-видимому, свидетельствуют о том, что социальное обучение требует от агента намного более развитого и вычислительно мощного «мозга», чем индивидуальное обучение.
4. РОБОТОТЕХНИЧЕСКИЙ БЛОК
4.1. Модели поведения. Были разработаны модели подражательного поведения и социального обучения. В основе этих моделей – семиотический подход, в котором в модели мира анимата имеется знак “Я”. Этот знак используется для сопоставления наблюдаемого контрспецифика с субъектом поведения – агентом (Карпов, 2019b), (Карпов, 2019a), (Карпов & Ивашкина, 2019). Модель подражательного поведения и модель социального обучения были разработаны на основе результатов исследований, проведенных в нейробиологическом блоке, и относятся к уровню стимул-реактивного поведения. Для реализации более сложных форм поведения была разработана модель ассоциативной памяти, отработка которой проводилась на задаче ориентации анимата в пространстве (Карпов & Карпова, 2019), (Карпов, 2019d).
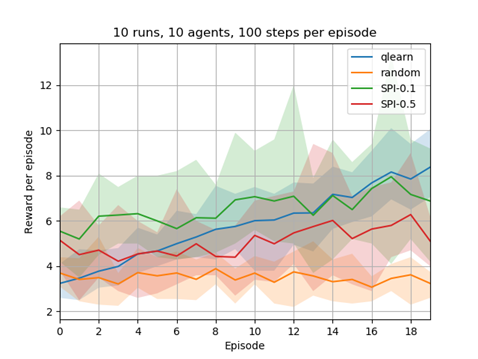
Был рассмотрен ряд моделей и архитектур, которые позволяют создавать высокоуровневый каркас для базовых механизмов социального поведения. Были рассмотрены вопросы группового управления обучающихся агентов на примере задачи фуражировки (Vorobiev & Rovbo, 2019). В ней обучающиеся индивидуально агенты на основе модификации алгоритма семантического вероятностного вывода, собирали пищу на квадратном поле без препятствий, образуя систему с неявным взаимодействием через среду (Рис.4.1.1). Эксперименты показали, что кривая обучения агентов больше зависела от типа и параметров алгоритма, чем от индивидуального опыта: агенты с одними настройками отличались гораздо сильнее от агентов с другими настройками по эффективности, чем между собой в силу индивидуальных различий в истории работы в среде, а усредненная скорость сбора пищи по агентам не сильно отличалась от работы одного агента в среде, поэтому при достаточно малом числе агентов в группе, индивидуальное обучение, в основном, происходит так же, как и без группы (Рис.4.1.2).
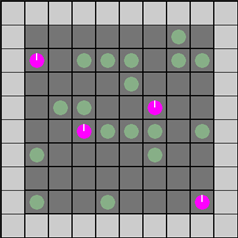 |
 |
| Рис.4.1.1. Квадратное поле | Рис.4.1.2. Результаты экспериментов |
Для тестирования возможностей управления агентом на основе социальных механизмов, инфраструктуры или его поведенческих параметров была создана серия виртуальных полигонов в виде имитационных моделей для задачи фуражировки, а также реальный полигон, пригодный для запуска имеющихся моделей роботов. На базе полигона была проведена апробация предложенных методов.
4.2. Система управления групповым поведением. Концепция социального управления групповыми робототехническими системами включает наличие различных базовых механизмов, объединение которых в систему позволяет реализовывать гибкое и эффективное управление группой. В рамках данной работы был рассмотрен ряд моделей и архитектур, которые позволяют создавать высокоуровневый каркас для базовых механизмов социального поведения. При этом семиотическое управление, использующее модель из множества семантических сетей и специальных связей между ними, образующих знаки, представляется наиболее подходящим способом реализации такой системы управления, поскольку создает условия для объединения коммуникативных возможностей и управляющих алгоритмов в единую структуру. Поэтому основное внимание в проекте было уделено исследованию иерархических и сетевых архитектур управления и их адаптивным свойствам.
Были рассмотрены и предложены некоторые модификации различных алгоритмов управления агентами с BDI архитектурой на основе досок объявлений и метода обменов (Рис.4.2.1). Был рассмотрен вопрос взаимодействия группы агентов на основе планирования с помощью локальных досок, позволяющее планировать достижение цели агентам, ограниченным в расстоянии возможной коммуникации (Ровбо & Овсянникова, 2019). Формулировка метода обменов, оригинально описанного в (Карпов & Мещерякова, 2004), была адаптирована для BDI модели, а также рассмотрены модификации, позволяющие агентам взаимодействовать за счет виртуального ресурса. Было проведено его сравнение с формулировкой STRIPS, которая показала, что задачи метода обменов могут быть рассмотрены в виде STRIPS задачи соответствующими методами, однако сам метод может приводить к ускорению нахождения решения за счет рассмотрения меньшего графа поиска.
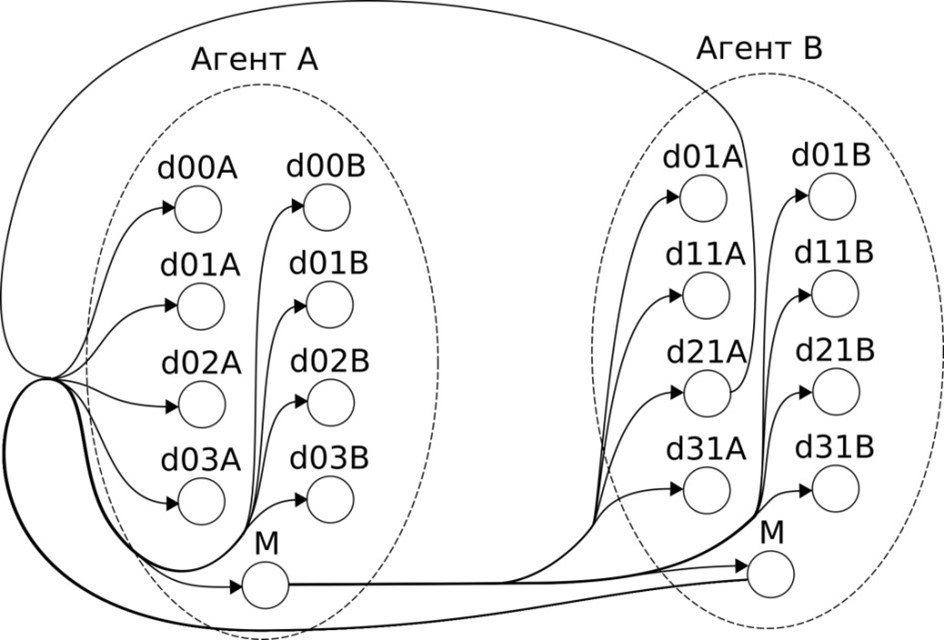
Рис.4.2.1. Алгоритм управления агентами с BDI архитектурой
Была разработана архитектура управления для робототехнических систем с обучением, позволяющая комбинировать различные алгоритмы целенаправленного поведения, а также предложен алгоритм управления верхнего уровня, переключающий управление между базовыми алгоритмами. Моделирование показало, что предложенный метод ведет себя более стабильно для различных вариантов задачи, чем каждый из базовых по отдельности, хотя и не дает наилучшего результата для каждого отдельного случая, для задачи, сформулированной в терминах обучения с подкреплением. Были продемонстрированы преимущества использования алгоритмов управления, основываемых на базовых алгоритмах, организованных в структуру управления верхнего уровня (Rovbo, Moscowsky, & Sorokoumov, 2019). Разработанная система управления группой мобильных агентов обеспечивает сочетание различных поведенческих алгоритмов для поиска наилучшим образом проявляющей себя в заданных условиях комбинации этих поведений. Каждое из поведений определяет, какие действия и в каких условиях будет выбирать агент; при этом разные виды поведений обеспечивают различных подход к решению задачи: на основе априорных знаний (планирование путём логического вывода), на основе прецедентов (алгоритм машинного обучения Q-learning) либо без предположений о природе задачи (случайный выбор); допустимо также добавление, например, специализированного исследовательского поведения или других вариантов действий. Благодаря тому, что переключение между поведениями возможно только в периодически наступающие моменты, каждое из них потенциально способно за предоставленный отрезок времени проявить свои характерные свойства. Благодаря собираемой статистике об успешности решения поставленной задачи оказывается возможной адаптация агента к конкретным условиям среды, что и было показано экспериментально.
Были разработаны архитектура и способ управления агентом на основе семиотической сети, использующие идеи из нейробиологии (теория функциональных систем Анохина (Анохин, 1973)), в том числе концепцию иерархического строения структуры управления (Осипов, Панов, Чудова, & Кузнецова, 2018)). Такой подход позволяет построить систему управления на основе управления агентом через его параметры, вместо постановки задач напрямую, что является важным элементом для реализации механизмов социального управления (Карпов, Карпова, & Кулинич, 2019). Предложенные методы позволили исследовать механизмы инициации агрессивного поведения агента, основанные на принципах манипуляции параметрами его системы управления, сходных с механизмом паразитического управления (Karpova & Karpov, 2018), (Карпова & Карпов, 2018).
Концептуальной основой созданных методов является семиотическое управление, использующее модель из множества семантических сетей и специальных связей между ними, образующих знаки. Все виды данных, поступающих в разработанную систему управления, представляются как фрагменты семантической сети, построенной по определяемым типом агента и предметной областью правилам, и интегрируются в модель мира в виде семиотической сети, имеющейся у агента (Ровбо & Сорокоумов, 2018a). Эта часть разработки имеет особое значение для развития междисциплинарных исследований, так как переносит понятийный аппарат семиотики и лингвистики на область исследований социального управления и позволяет интегрировать модели этологических и нейробиологических исследований в единую структуру.
Знаковая (семиотическая) модели также позволяет частично решить проблему коллизии параллельно работающих автоматов за счет общего списка ресурсов. Это подход был использован для управления работой поведенческих программ, решающих разные подзадачи. Анализ текущего состояния семиотической сети позволяет определить допустимые в текущий момент действия агента. Однако при параллельном осуществлении разных управляющих воздействий на один объект, коллизии всё ещё могут возникать. Соответствующий алгоритм был разработан и протестирован на модельной задаче.
Вопросы группового управления обучающимися агентами рассматривались на примере задачи фуражировки (Vorobiev & Rovbo, 2019). Для применения исследованных биоподобных механизмов быстрого социального обучения и подражательного поведения в разработке искусственных агентов создана семиотическая модель быстрого социального обучения. Она использована для изучения свойств коллектива агентов, решающих общую задачу. Средствами этой модели реализована саморегуляция поведения членов коллектива и его адаптация к внешним условиям. Обучение агентов ведётся в том числе путём подражания действиям близлежащих конспецификов, т.е. с использованием наблюдаемых у живых организмов контагиозности. В основу этих моделей положен подход, в котором в модели мира анимата имеется знак “Я”, используемый для сопоставления наблюдаемого контрспецифика с субъектом поведения – агентом (Карпов, 2019b), (Карпов, 2019a), (Карпов & Ивашкина, 2019).
Вместе с этим методом обучения применялся и другой метод: коррекция моральных норм поведения, реализованная с использованием эмоционально-потребностной архитектуры. Для обучения агентов был создан специализированный модуль семиотического вывода для быстрого социального обучения и модельная среда.
4.3. Подсистема взаимодействия человека с группой роботов. В рамках исследований по человеко-машинным интерфейсам был предложен метод управления индивидуальным роботом на основе оценки эмоций (Карпова & Ровбо, 2018). Кроме того, для обеспечения удобного интерфейса операторского управления создана подсистема взаимодействия человека с группой роботов средствами виртуальной реальности, обеспечивающая работу как с реальными, так и с моделируемыми роботами, созданными в среде симуляции Gazebo. Разработанная подсистема взаимодействия человека с группой роботов средствами виртуальной и дополненной реальности состоит из двух частей: драйвера шлема виртуальной реальности (т.е. системы визуализации) и обработчика данных, взаимодействующего с этим драйвером. Программная часть системы управления включает в себя набор отдельных программ, работающих под управлением фреймворка ROS; система визуализации создана с использованием игрового движка Unreal Engine 4 (Рис.4.3.1)
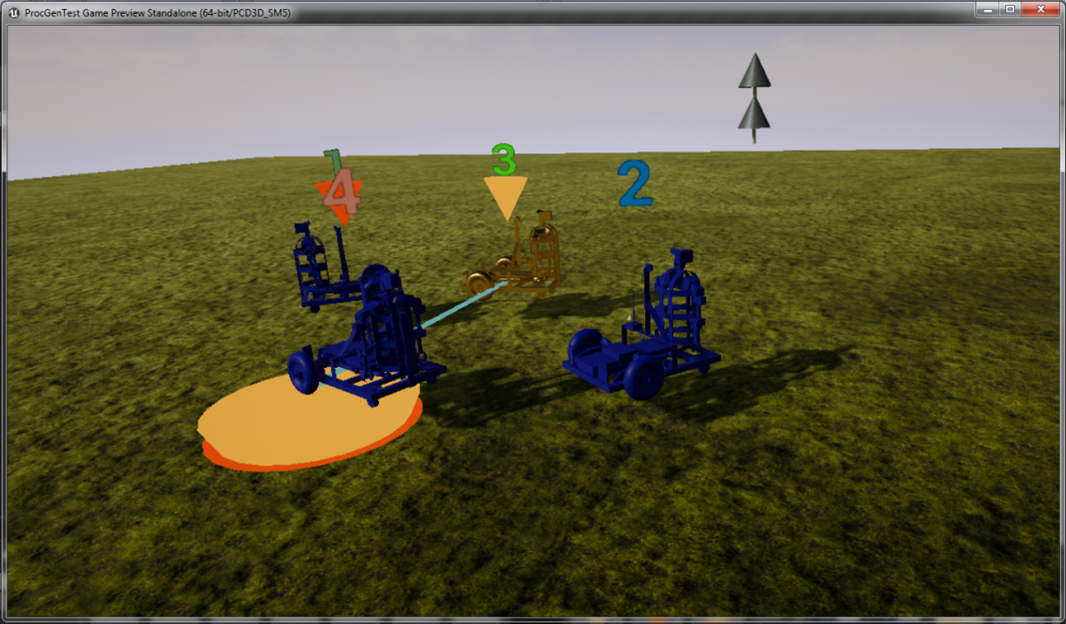
Рис.4.3.1. Внешний вид интерфейса визуализатора
Эффективность предложенного решения измерена на тестовой задаче; оказалось, что среднее время верной реакции на события интерфейса виртуальной реальности (2.7 с) ниже аналогичного времени для традиционного графического интерфейса (3.0 с), причём это различие статистически значимо (p = 0.006) (Рис.4.3.2).
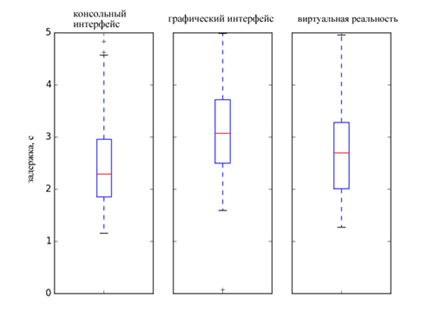
Рис.4.3.2. Среднее время задержки для разных типов исследованных интерфейсов
Другим результатом стало различие между субъективным восприятием опыта работы пользователем и объективными показателями (задача, указанная пользователями как более сложная, в действительности была решена с меньшим числом ошибок, чем указанная как более лёгкая). Результаты экспериментов показывают, что эффективность использования интерфейса виртуальной реальности для модельной задачи сравнима с результатами на традиционных видах интерфейсов – консольном и графическом (Рис.4.3.3), при этом такой интерфейс по сравнению с обычным графическим может обеспечить небольшой выигрыш по скорости.
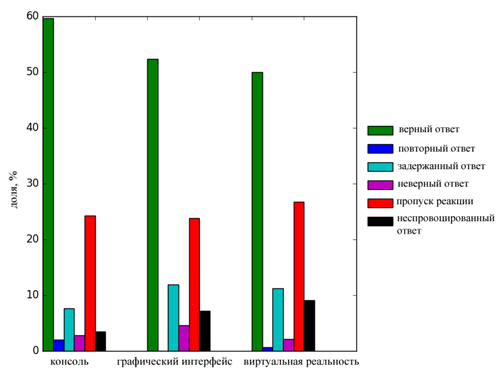
Рис.4.3.3. Классификация ошибок по точности ответа пользователя
4.4. Мораль как адаптивный механизм и средство управления социумом. Был исследован вопрос о применимости понятий морали к искусственным агентам – роботам. Рассматривая мораль как способ разрешения конфликтов, был рассмотрен вопрос об условиях, при которых робот может считаться моральным агентом. Эти вопросы были освещены в работе (Karpov, 2020). Было показано, что наличие эмоционально-потребностной архитектуры системы управления (СУ) роботом на нижнем уровне, а также когнитивной надстройки, реализуемой с помощью семиотической модели, позволяют реализовать, в частности, такие феномены поведения как эмпатия и симпатия (основы морального поведения). При этом важнейшими особенностями семиотической СУ являлись вершины, реализующие знак Я (субъективное Я), а также связи, определяющие понятие агентивности (см. когнитивный блок). Был проведен ряд вычислительных экспериментов, показавших зависимость эффективности поведения социума в различных по агрессивности/благополучию средах от значения параметра “склонность к симпатии”. То, что мораль является средством регуляции поведения индивида и социума в целом, известно и в социологии, и в этологии. Здесь важнейшим результатом стало то, что эти механизмы были перенесены на задачу управления социумом искусственных агентов.
Некоторые журнальные публикации
2021
- Ovchinnikova, A. O., Vasilyev, A. N., Zubarev, I. P., Kozyrskiy, B. L., & Shishkin, S. L. (2021). MEG-based detection of voluntary eye fixations used to control a computer. Frontiers in Neuroscience. In press. (Ovchinnikova, Vasilyev, Zubarev, Kozyrskiy, & Shishkin, 2021)
- Московский А.Д., Бургов Е.В., Овсянникова Е.Е. Об одном подходе к распознаванию сцен группой роботов на основе локального взаимодействия // Мехатроника, Автоматизация, Управление. 2021. № 2 [В печати]
2020
- Barykina, N., Sotskov, V., Gruzdeva, A., Wu, Y., Portugues, R., Subach, O., … Subach, F. (2020). FGCaMP7, an Improved Version of Fungi-Based Ratiometric Calcium Indicator for In Vivo Visualization of Neuronal Activity. International Journal of Molecular Sciences, 21, 3012. https://doi.org/10.3390/ijms21083012 (Barykina et al., 2020)
- Zhao, D. G., Karikov, N. D., Melnichuk, E. V., Velichkovsky, B. M., & Shishkin, S. L. (2020). Voice as a Mouse Click: Usability and Effectiveness of Simplified Hands-Free Gaze-Voice Selection. Applied Sciences, 10(24), 8791. https://doi.org/10.3390/app10248791 (Zhao et al., 2020)
- Бургов Е.В. Трансформации многовидовых ассоциаций муравейников с факультативными доминантами. Диссертация на соискание ученой степени кандидата биологических наук. 2020. 177 с. http://sev-in.ru/sites/default/files/2020-02/DissBurgov.pdf
- Бургов Е.В. Трансформации многовидовых ассоциаций муравейников с факультативными доминантами. Автореферат диссертации на соискание ученой степени кандидата биологических наук. 2020. 24 с. http://sev-in.ru/sites/default/files/2020-03/AutorefBurgovFinal.pdf
- Величковский, Б. М., Осипов, Г. С., Носовец, З. А., & Величковский, Б. Б. (2020). Личностный смысл и решение творческих задач: современные нейрокогнитивные исследования. Искусственный интеллект и принятие решений, (3), 3–14. https://doi.org/10.14357/20718594200301 (Величковский, Осипов, Носовец, & Величковский, 2020)
- Малышев А.А., Бургов Е.В. К вопросу о параметрах биоинспирированных моделей поведения при моделировании групповой фуражировки. Тр. СПИИРАН, 2020, вып. 19, том 1, с. 79–103. http://www.mathnet.ru/php/archive.phtml?wshow=paper&jrnid=trspy&paperid=1092&option_lang=rus
- Ровбо М.А., Овсянникова Е.Е. [В редакции] Methods of Local Behavior Planning for Agents with BDI Architecture // Sci. Tech. Inf. Process. 2020. (Ровбо & Овсянникова, 2020)
2019
- Velichkovsky B.M., Korosteleva A.N., Pannasch S., Helmert J.R., Orlov V.A., Sharaev M.G., Velichkovsky B.B., Ushakov V L. (2019). Two visual systems and their eye movements: A fixation-based event-related experiment with ultrafast fMRI reconciles competing views. STM, 11(4), 7-18 doi: 10.17691/stm2019.11.4.01 (Velichkovsky et al., 2019)
- Карпов В.Э. Социальные сообщества роботов: от реактивных к когнитивным агентам // Мягкие измерения и вычисления, 2019, 15(2), с. 61–77. (Карпов, 2019c)
- Ровбо М.А., Овсянникова Е.Е. Методы локального планирования поведения агентов с BDI архитектурой // Искусственный интеллект и принятие решений, 2019, № 1, с. 76–84. https://doi.org/10.14357/20718594190107 (Ровбо & Овсянникова, 2019)
2018
- Ровбо, М. А., Сорокоумов, П. С. (2018). Архитектура системы управления интеллектуальным агентом на основе семиотической сети. // Открытое образование, 2018, №22(5), с. 84–93. https://doi.org/https://doi.org/10.21686/1818-4243-2018-5-84-93 (Ровбо & Сорокоумов, 2018a)
- Велихов Е.П., Котов А.А., Лекторский В.А., Величковский Б. М. Междисциплинарные исследования сознания: 30 лет спустя. // Вопросы философии, № 12, 2018 (в печати).
- Торопова К.А., Трошев Д.В., Ивашкина О.И., Анохин К.В. Активация экспрессии c-fos в ретросплениальной коре, но не гиппокампе, сопровождает формирование ассоциации между обстановкой и безусловным стимулом и ее последующее извлечение у мышей // Журнал высшей нервной деятельности им. И.П. Павлова. 2018. Т. 68. № 6. С. 756–770.
- Карпова, И. П., & Карпов, В. Э. (2018). Агрессия в мире аниматов, или О некоторых механизмах управления агрессивным поведением в групповой робототехнике. Управление большими системами, 76, 173–218, 2018. https://doi.org/10.25728/ubs.2018.76.6 (Карпова & Карпов, 2018)
Конференции
2020
- Karpov V.E. Can a robot be a moral agent? // Artificial Intelligence. Lecture Notes in Artificial Intelligence (LNAI). 18th Russian Conference, RCAI 2020, Moscow, Russia, October 10–16, 2020, Proceedings. Springer, 2020. С. 61–70. https://www.springer.com/gp/book/9783030595340 (Karpov, 2020)
- Sergei L. Shishkin et al. Contrasting gaze-based interaction vs. spontaneous gaze behavior: EEG, MEG and fMRI studies //The 20th European Conference on Eye Movements, ECEM (Shishkin, Vasilyev, Nuzhdin, Dubynin, Svirin, Butorina, Zhao, Kozyrskiy, Malakhov, Ushakov Vadim L. Alexei E. Ossadtchi, et al., 2020)
- Бургов Е.В. Энтомологические исследования для создания групповых роботехнических систем. Концептуальные и прикладные аспекты научных исследований и образования в области зоологии беспозвоночных: сборник статей V Международной конференции. Томск 26–28 октября 2020 г. – Томск: Издательство Томского государственного университета, 2020b. С. 44–47.
- Величковский Б.М. 11th International Multiconference “Bioinformatics of Genome Regulation and Structure/Systems Biology», Новосибирск, РАН, 6-10 июля 2020 (приглашенная пленарная лекция “Brain Asymmetry in Cognitive Processes”)
- Величковский Б.М. Международная конференция «Наука без границ», Москва, МГЛУ. 28-30 октября 2020 (приглашенная пленарная лекция “Neurosemantics – the New Approach in Interdisciplinary Cognitive Studies”)
- Величковский Б.М. Первый национальный конгресс по когнитивной науке, искусственному интеллекту и нейроинформатике. Москва, РАН, 10-16 октября 2020 (приглашенная пленарная лекция “Trends and Perspectives in Cognitive Science”)
- Социальная передача вкусовых предпочтений: экспрессия с-fos и динамика нейрональной активности // Плюснин В.В., Торопова К.А., Ивашкина О.И. // XXI Зимняя молодежная школа по биофизике и молекулярной биологии // пос. Репино, 24-29 февраля 2020 г.
- Relationship between cellular representations of individually and socially acquired memories: c-fos expression patterns and hippocampal neuronal activity in social transmission of food preference in mice // Плюснин В.В., Торопова К.А., Ивашкина О.И., Анохин К.В. // Оптогенетика+ 2020 Санкт-Петербург, 22-26 апреля 2020 г.
- Разработка подходов к долгосрочной регистрации кальциевых ответов идентифицированных нейронов // Плюснин В.В., Торопова К.А., Ивашкина О.И., Анохин К.В. // Нелинейные волны – 2020 Нижний Новгород, 29 февраля-06 марта 2020 г.
- Relationship between cellular representations of individually and socially acquired memories: c-Fos expression patterns and hippocampal neuronal activity in social transmission of food preference in mice // Плюснин В.В., Торопова К.А., Ивашкина О.И., Анохин К.В. // FENS 2020 Virtual Forum, 11-15 июля 2020
2019
- Rovbo, M., Moscowsky, A., & Sorokoumov, P. (2019). Hierarchical Control Architecture for a Learning Robot Based on Heterogenic Behaviors. // RCAI 2019 (17th Russian Conference on Artificial Intelligence), pp. 44–55. https://doi.org/10.1007/978-3-030-30763-9_4 (Rovbo et al., 2019)
- Sergei L. Shishkin Combining the eye gaze, EEG and MEG for creating new modes of human-computer interaction // The 5th International Conference BCI: Science and Practice. 3–5 октября 2019 г., Cамара, Россия (Shishkin, 2019)
- Sergei L. Shishkin et al. Contrasting gaze-based interaction vs. spontaneous gaze behavior: EEG, MEG and fMRI studies //The 20th European Conference on Eye Movements, ECEM 2019, August 18-22, Alicante, Spain
- Vorobiev V., Rovbo M. (2019). Analysis of Semantic Probabilistic Inference Control Method in Multiagent Foraging Task. // Open Semantic Technologies for Intelligent Systems. Research Papers Collection (pp. 237–242). Minsk. (Vorobiev & Rovbo, 2019)
- Карпов В.Э., Карпова И.П. О некоторых моделях ориентации аниматов // II научная конференция “Ориентация и навигация животных”, Москва, 2-4 октября 2019. М.: Товарищество научных изданий КМК, 2019. С. 40. (Карпов & Карпова, 2019)
2018
- Isachenko, A. V., Zhao, D. G., Melnichuk, E. V., Dubynin, I. A., Velichkovsky, B. M., & Shishkin, S. L. The Pursuing Gaze Beats Mouse in Non-Pop-Out Target Selection. // The 2018 IEEE international conference on systems, man, and cybernetics (SMC2018). Miyazaki, Japan, October 7-10, 2018. URL: http://www.smc2018.org/
- Plusnin V., Toropova K., Ivashkina O. Social transmission of fear in mice: the role of dominance status // 17th Annual Molecular and Cellular Cognition Society Symposium, November 1-2, 2018, San Diego, USA. epub.
- Karpova I., Karpov, V. Some Mechanisms for Managing Aggressive Behavior in Group Robotics. // 29th DAAAM International Symposium on Intelligent Manufacturing and Automation, Zadar, Croatia, EU, 24h-27th October 2018.
- Ровбо М.А., Карпова И.П. К вопросу об использовании эмоциональной окрашенности команды при голосовом управлении роботом // Шестнадцатая Национальная конференция по искусственному интеллекту с международным участием КИИ-2018 (24–27 сентября 2018 г., г. Москва, Россия). Труды конференции. В 2-х томах. Т 1. Москва: РКП, 2018. Т. 1. P. 116–123.
- Бургов Е.В. Функциональные основы экологической сегрегации видов у муравьев: предварительные данные // Муравьи и защита леса. Материалы XV Всероссийского мирмекологического симпозиума, Екатеринбург, 20-24 августа 2018, С. 25–31. Екатеринбург: УГЛТУ (Бургов, 2018b).
- Бургов Е.В., Московский А.Д. Разработка системы автоматического распознавания объектов на видеозаписи для мирмекологических исследований. // Муравьи и защита леса. Материалы XV Всероссийского мирмекологического симпозиума, Екатеринбург, 20-24 августа 2018, С. 32–35. Екатеринбург: УГЛТУ (Бургов & Московский, 2018b).
Публикации в СМИ
- Мамедьяров З. От роя к социуму роботов (2019). (интервью с В.Карповым). Эксперт, 2019, 1139(43). Retrieved from https://expert.ru/expert/2019/43/ot-roya-k-sotsiumu-robotov/
- Лескова Н. Нравственный императив для анимата. (2019). Интервью с В.Э.Карповым // В мире науки / Sci. Am. 2018. № 11. С. 12-17 https://scientificrussia.ru/interviews/nravstvennyj-imperativ-dlya-animata-v-mire-nauki-11-2018-g
Приложения
- Дополнительные материалы
- Дополненые материалы итогового отчета
- Архив. Промежуточные отчеты прошлых годов
- Отчет за 2017 – 2018 год
- Отчет за 2018 – 2019 год